
Amortisseur magnéto-rhéologique
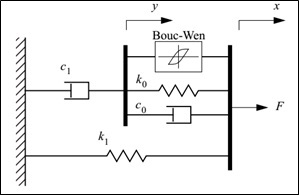
Le modèle Bouc-Wen modifié est utilisé pour simuler le comportement dynamique de l'amortisseur MR impliquant des paramètres dépendant du voltage. Cela a pour but de modéliser la fluctuation des champs magnétiques. La figure (2.1) montre le modèle rhéologique de l'amortisseur.
Fondamental :
La force générée par le modèle Bouc-Wen modifié peut être exprimée par l'équation suivante :
Avec :
fMR : la force de l'amortisseur magnéto-rhéologique
c1 : Amortissement du dispositif magnéto-rhéologique
y' : variable évolutionnaire
k1 : rigidité du dispositif magnéto-rhéologique
xd : déplacement relatif aux extrémités de l'amortisseur
x0 : déplacement initiale du piston de l'amortisseur
Syntaxe : Code MATLAB d'un amortisseur MR
kz1 = dt*( -gamma.*abs(v1).*z2.*abs(z2).^(n-1) - beta.*(v1).*abs(z2).^n + A.*(v1) );
kz2 = dt*( -gamma.*abs((v1+v2)/2).*(z2+kz1/2).*abs(z2+kz1/2).^(n-1)-beta.*( (v1+v2)/2 ).*abs(z2+kz1/2).^n + A.*( (v1+v2)/2 ) );
kz3 = dt*( -gamma.*abs((v1+v2)/2).*(z2+kz2/2).*abs(z2+kz2/2).^(n-1) - beta.*( (v1+v2)/2 ).*abs(z2+kz2/2).^n + A.*( (v1+v2)/2 ) );
kz4 = dt*( -gamma.*abs(v2).*(z2).*abs(z2).^(n-1) -beta.* v2.*abs(z2+kz3).^n + A.* v2 );
Le code MATLAB présenté au dessous donne comme résultat les quatre variable desquels dépends l'amortisseur MR, ce code fait partie d'un ensemble de fonction qui une fois réunies donne la force reproduite par l'amortisseur MR selon les conditions de chargement externes.




